psychology
Problem 1-1
The problem text is not included due to copyright reasons
This page presents only the solutions to the problems; the original problem statement is not shared as it is subject to copyright.
1
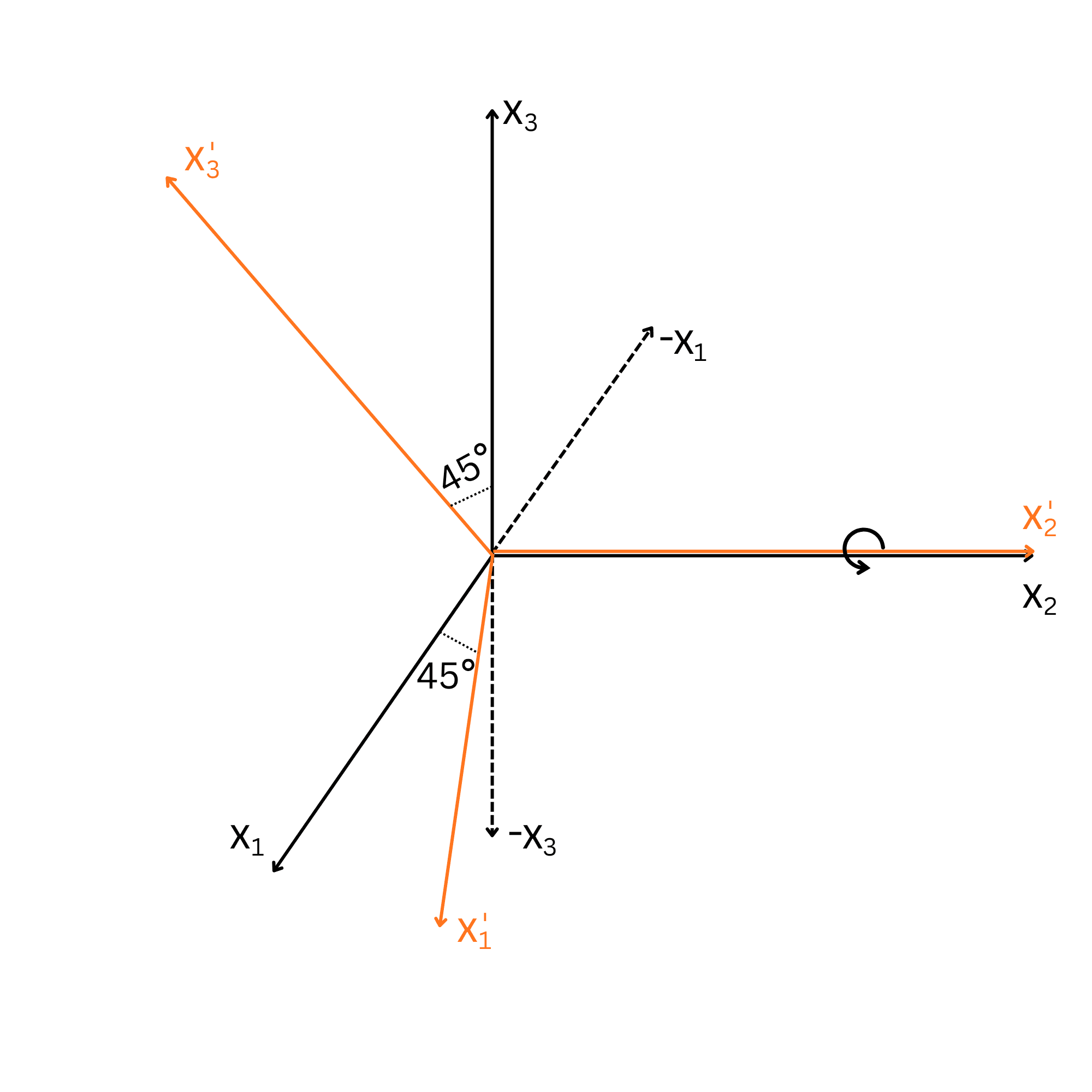
Let us visually illustrate the rotation described in the problem using coordinates.
Let us denote the axes after the rotational motion as , , and . In this case, the configuration of the axes resulting from a rotation about the axis can be represented as shown in Figure-1.
As observed in Figure-1, since the rotation is performed about the axis, the axis remains unchanged; therefore, the axis coincides with the original axis in direction. On the other hand, as a result of the rotation, the axis shifts into the region and within the plane, and is denoted by . Similarly, the axis moves into the region and within the same plane, and is represented by .
2
Let us now write the transformation relations.
As seen in Figure~1, the axis lies in the plane within the region and . Therefore, the angle between and the axis is , while the angle between and the axis is (see Figure-1). Using these geometric relations, the axis can be expressed in terms of , , and as
Similarly, since the coordinate system is rotated about the axis, the axis remains unchanged. Consequently, the angle between and the axis is , whereas the angles between and the and axes are . Accordingly, the axis can be written as
Applying the same reasoning to the axis, it is observed that lies in the plane within the region and . Hence, the angle between and the axis is , while the angle between and the axis is (see Figure~1). Using these geometric relations, the axis can be expressed as
3
Let us write the obtained transformation relations together:
Since , these transformation equations can be written in the following simplified form:
4
Let us express the transformation equations in matrix form:
5
Let us substitute the cosine values.
Using and in the matrix equation, we obtain
6