psychology
Problem 1-1
Telif hakları nedeniyle problem metni yayınlanmamaktadır.
Bu sayfada yalnızca problem çözümleri sunulmakta olup, ilgili sorunun orijinal metni telif haklarına tabi olduğu için paylaşılmamaktadır.
1
Problemdeki hareketi koordinatlar üzerinden gösterelim:
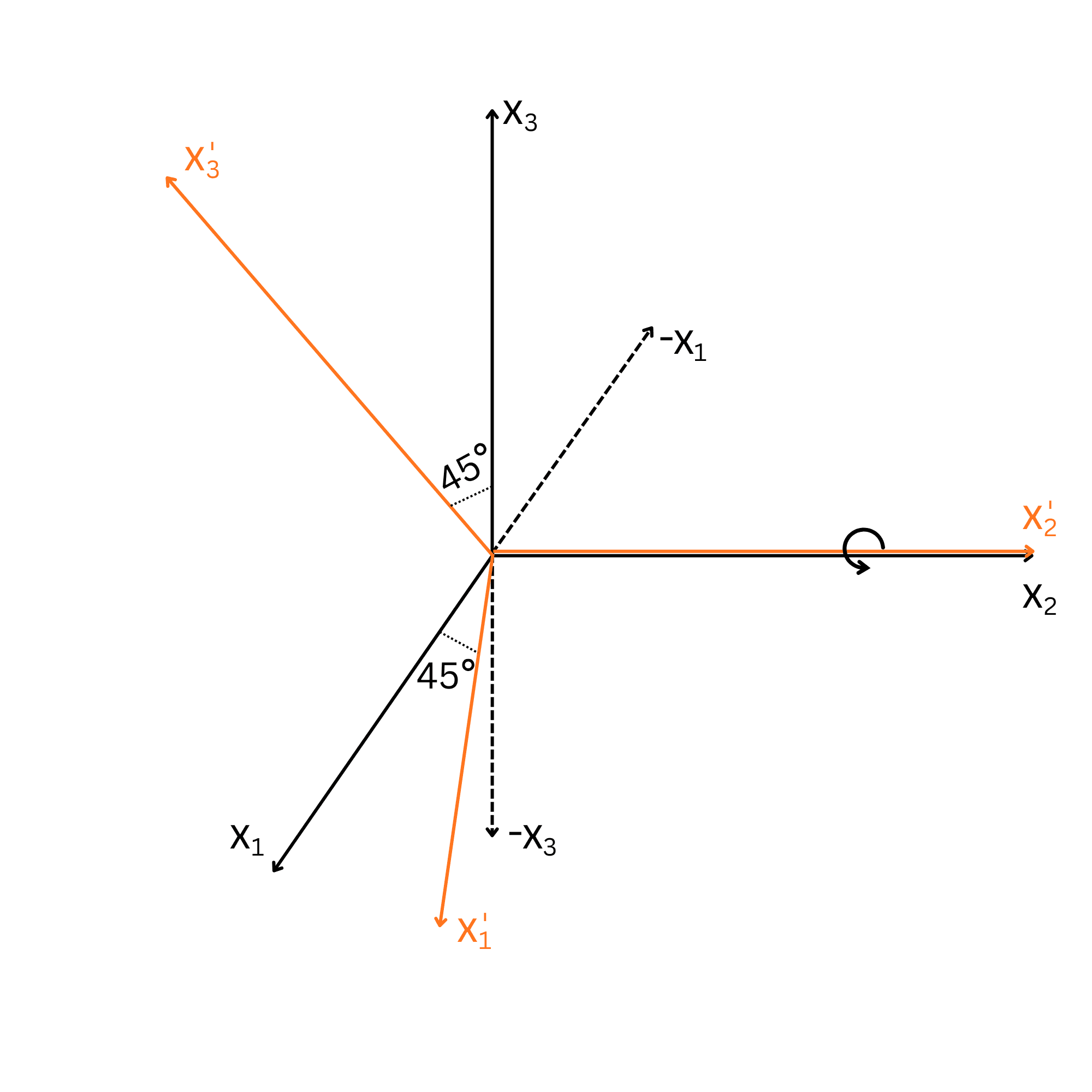
Dönme hareketi sonrasında oluşan eksenleri , ve olarak tanımlayalım. Bu durumda, ekseni etrafında ’lik bir dönme sonucunda eksenlerin konumu Şekil 1’de gösterildiği gibi ifade edilebilir.
Şekil 1’de görüldüğü üzere, dönme hareketi ekseni etrafında gerçekleştiğinden ekseni değişmeden kalır; dolayısıyla görselde ekseni, ekseni ile aynı doğrultudadır. Buna karşılık, dönme hareketi sonucunda ekseni, düzleminde ve bölgesine doğru kayarak ile gösterilmektedir. Benzer şekilde, ekseni ise düzleminde ve bölgesine doğru yer değiştirerek ile ifade edilmektedir.
2
Dönüşüm ilişkilerini yazalım:
Dönüşüm ilişkilerini yazalım.
Şekil~1’den de görüldüğü üzere, ekseni düzleminde ve bölgesinde yer almaktadır. Bu nedenle, ile ekseni arasındaki açı , ile ekseni arasındaki açı ise ’tir (bkz. Şekil~1). Bu geometrik ilişkiler kullanılarak ekseni, , ve cinsinden aşağıdaki şekilde ifade edilebilir:
Benzer şekilde, koordinat sistemi ekseni etrafında döndürüldüğü için ekseni değişmeden kalır. Dolayısıyla, ile ekseni arasındaki açı iken, ile ve eksenleri arasındaki açılar ’dir. Bu durumda ekseni, , ve cinsinden aşağıdaki gibi yazılabilir:
Aynı yaklaşım ekseni için uygulandığında, ekseninin düzleminde ve bölgesinde yer aldığı görülür. Buna göre, ile ekseni arasındaki açı , ile ekseni arasındaki açı ise ’tir (bkz. Şekil~1). Bu geometrik ilişkiler kullanılarak ekseni aşağıdaki şekilde ifade edilir:
3
Elde edilen bu dönüşüm ilişkilerini birlikte yazalım:
Bu denklemlerde olduğu göz önüne alındığında, dönüşüm ilişkileri aşağıdaki daha sade biçimde ifade edilebilir:
4
Dönüşüm eşitliklerini matris formda yazalım:
5
Kosinüs değerlerini yerine yazalım:
ve değerlerini matris eşitliğinde yerine yazdığımızda
eşitliğini elde ederiz.
6