Yön Kosinüsleri
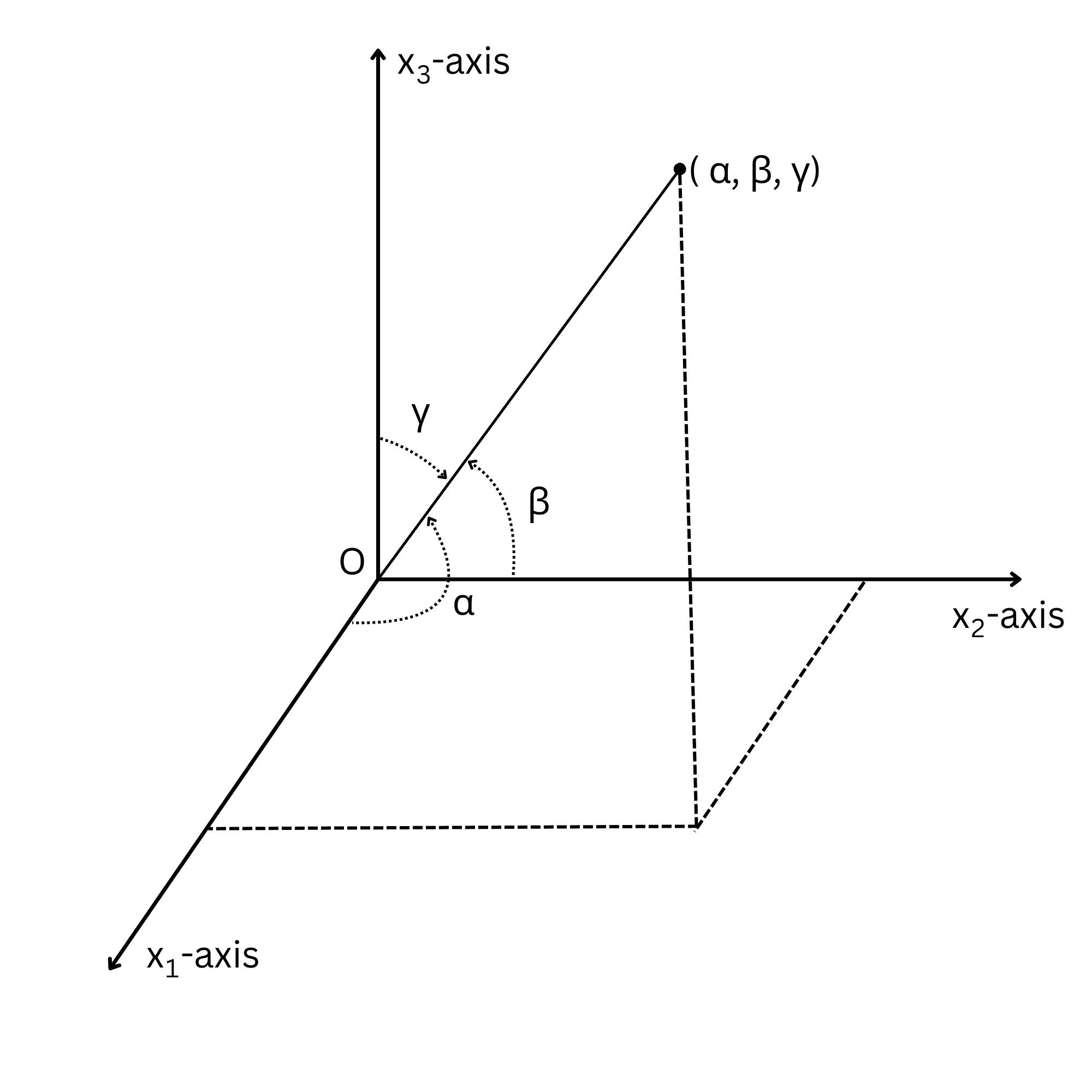
Üç boyutlu uzayda orijinden geçen bir doğru düşünelim. Bu doğru , ve koordinat eksenleri ile belirli açılar yapar. Bu açılar sırasıyla , ve ile gösterilir. (Şekil 1) Bu açıların kosinüsleri yön kosinüsleri olarak adlandırılır ve doğrunun uzaydaki yönünü belirler.