Koordinat Dönüşümlerine Neden İhtiyaç Duyarız?
Elinizde bir Kartezyen koordinat sisteminde bir noktasının koordinatlarının olarak verildiğini düşünelim.
Şimdi başka bir kişinin, sizin eksenlerinize göre döndürülmüş farklı bir eksen takımı kullandığını varsayalım. Bu durumda aynı noktasını onların koordinat sisteminde olarak nasıl ifade edebiliriz?
İşte bu, koordinat dönüşümlerinin temel sorusudur.
Koordinat dönüşümleri, iki referans sistemi birbirine göre döndürülmüş olduğunda, koordinatları bir sistemden diğerine düzenli ve sistematik bir şekilde dönüştürmemizi sağlar.
İki Boyutlu Durum
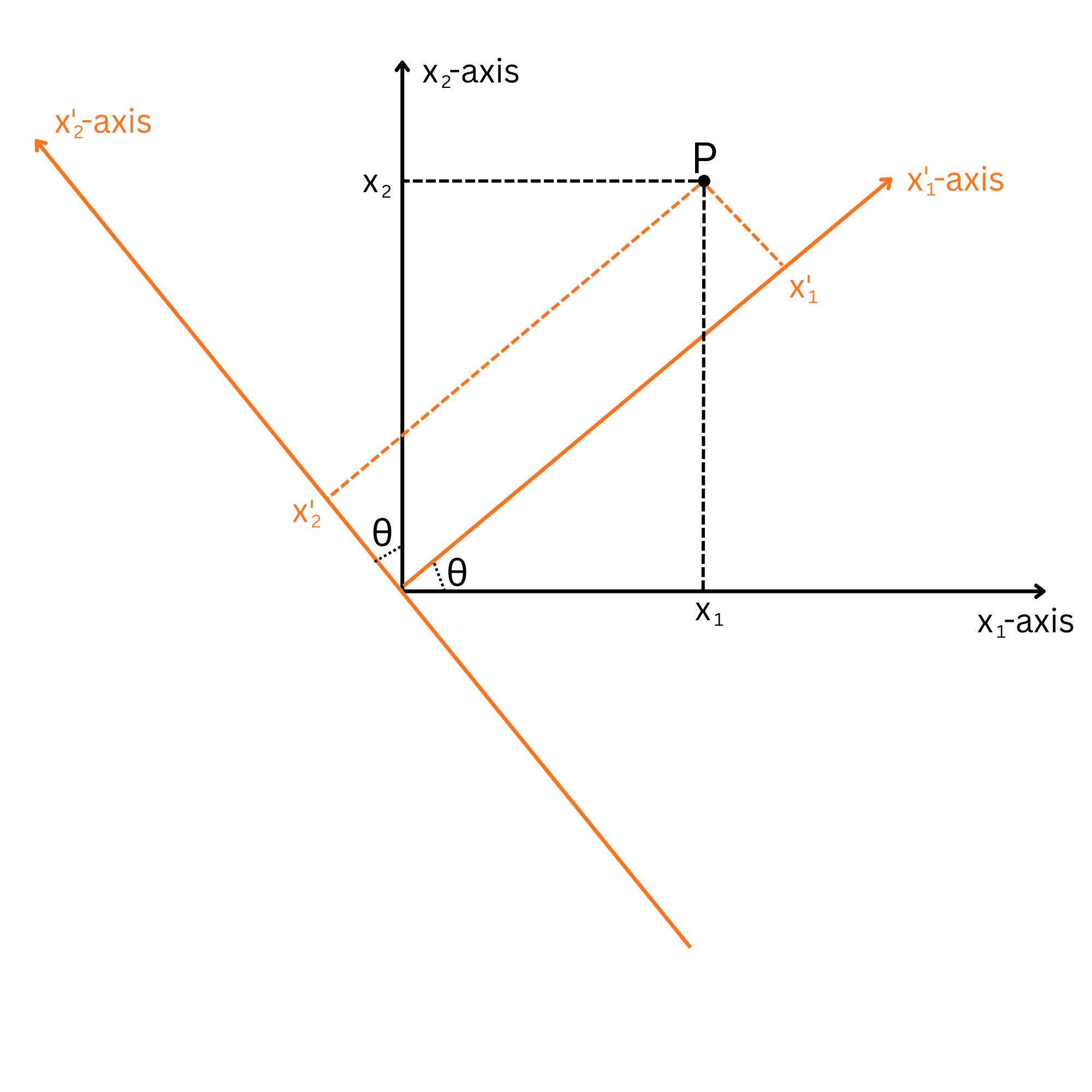
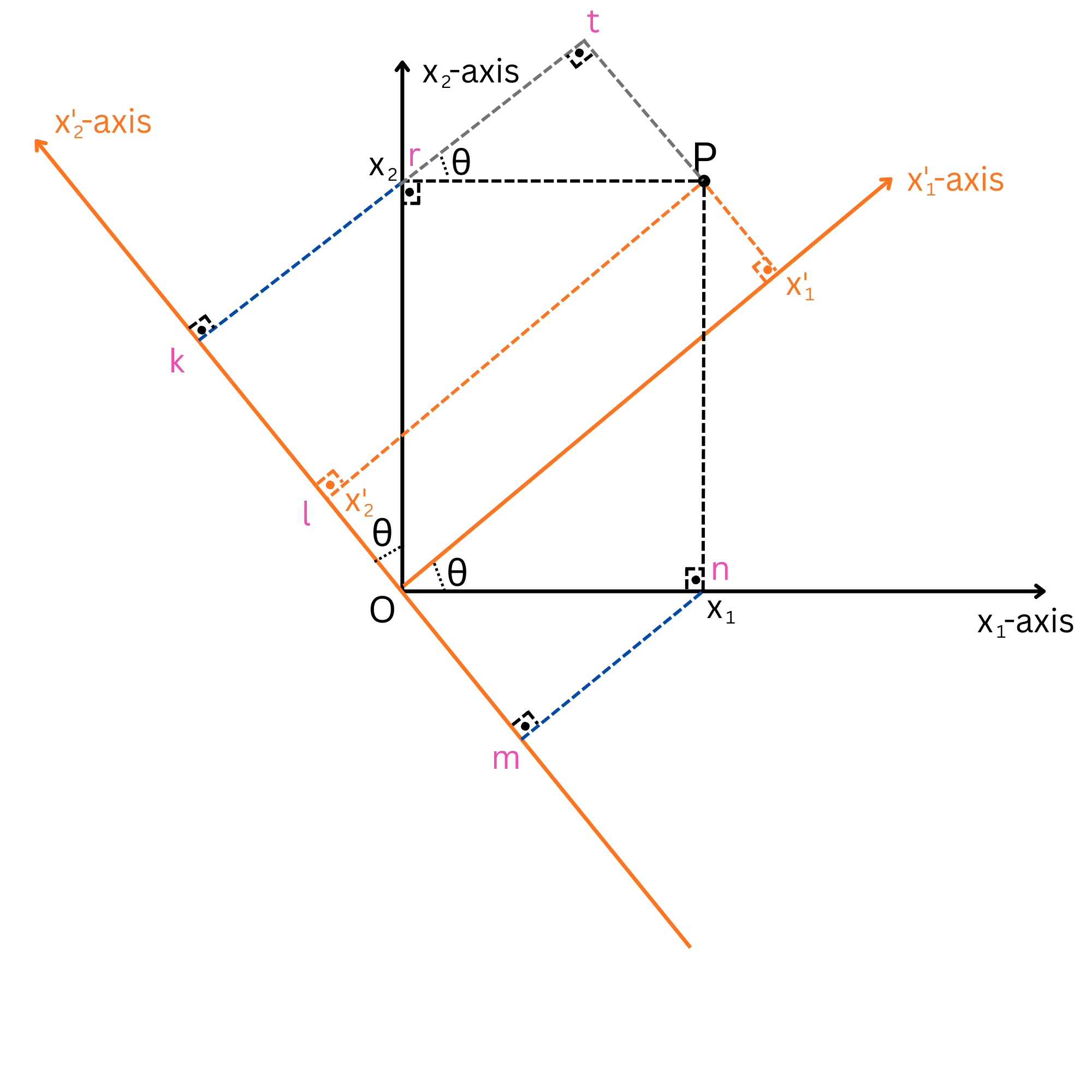
Önce iki boyutlu durumdan başlayalım. Yeni koordinat eksenlerinin , başlangıçtaki eksenlerin açısı kadar döndürülmesiyle elde edildiğini varsayalım. (Şekil 1'e bakınız.)
Yeni koordinat ’i bulmak için, başlangıç koordinatlarını yeni ekseni üzerine izdüşürürüz. (Bkz. Şekil 2, mavi çizgiler)
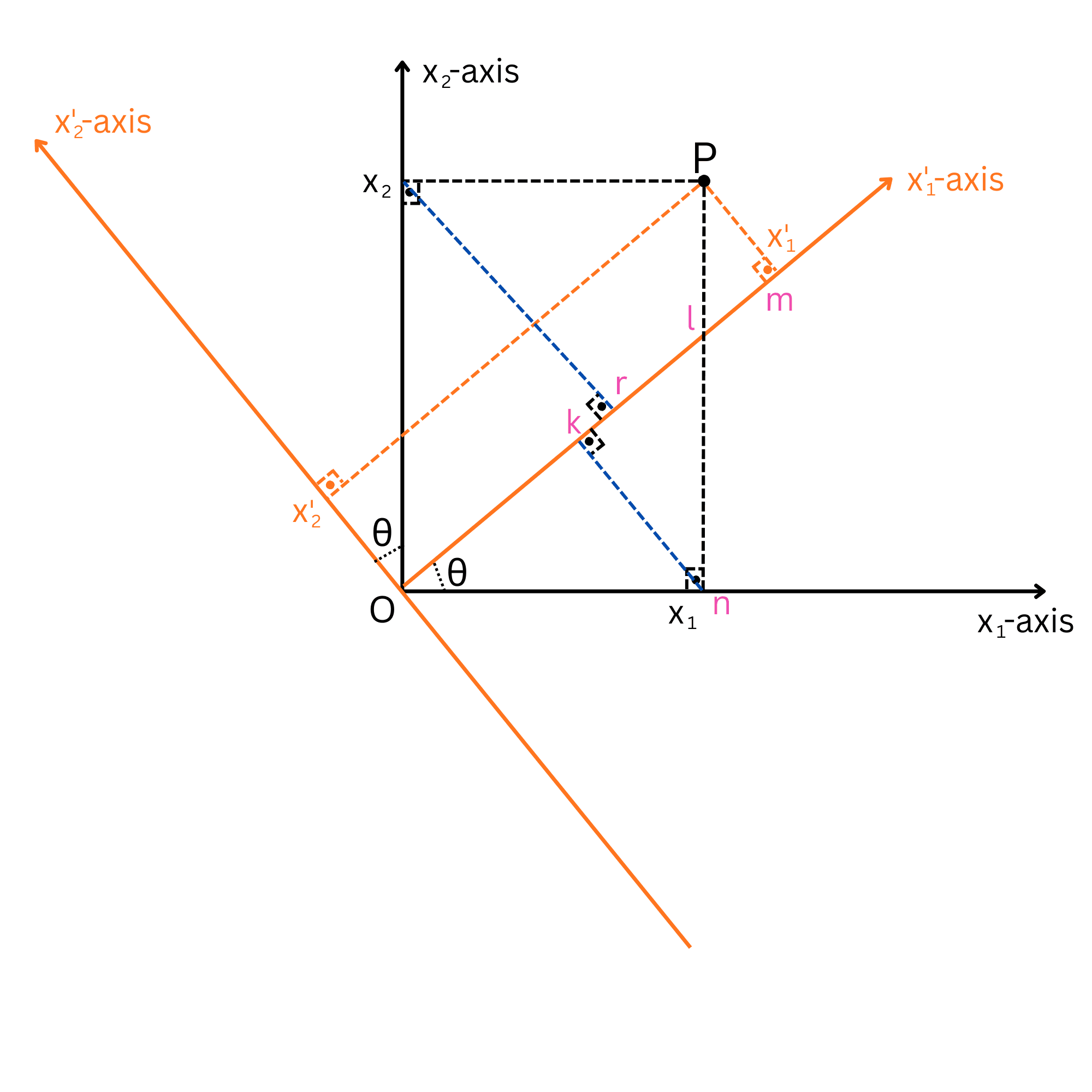
Şekil 2’de noktaları , , , ve olarak adlandıralım. Daha sonra ve ’nin ekseni üzerindeki izdüşümlerini yazalım:
Daha sonra doğrusuna paralel bir doğru ve eksenine paralel başka bir doğru çizelim. Bu iki doğru noktasında kesişsin (Bkz. Şekil 3).
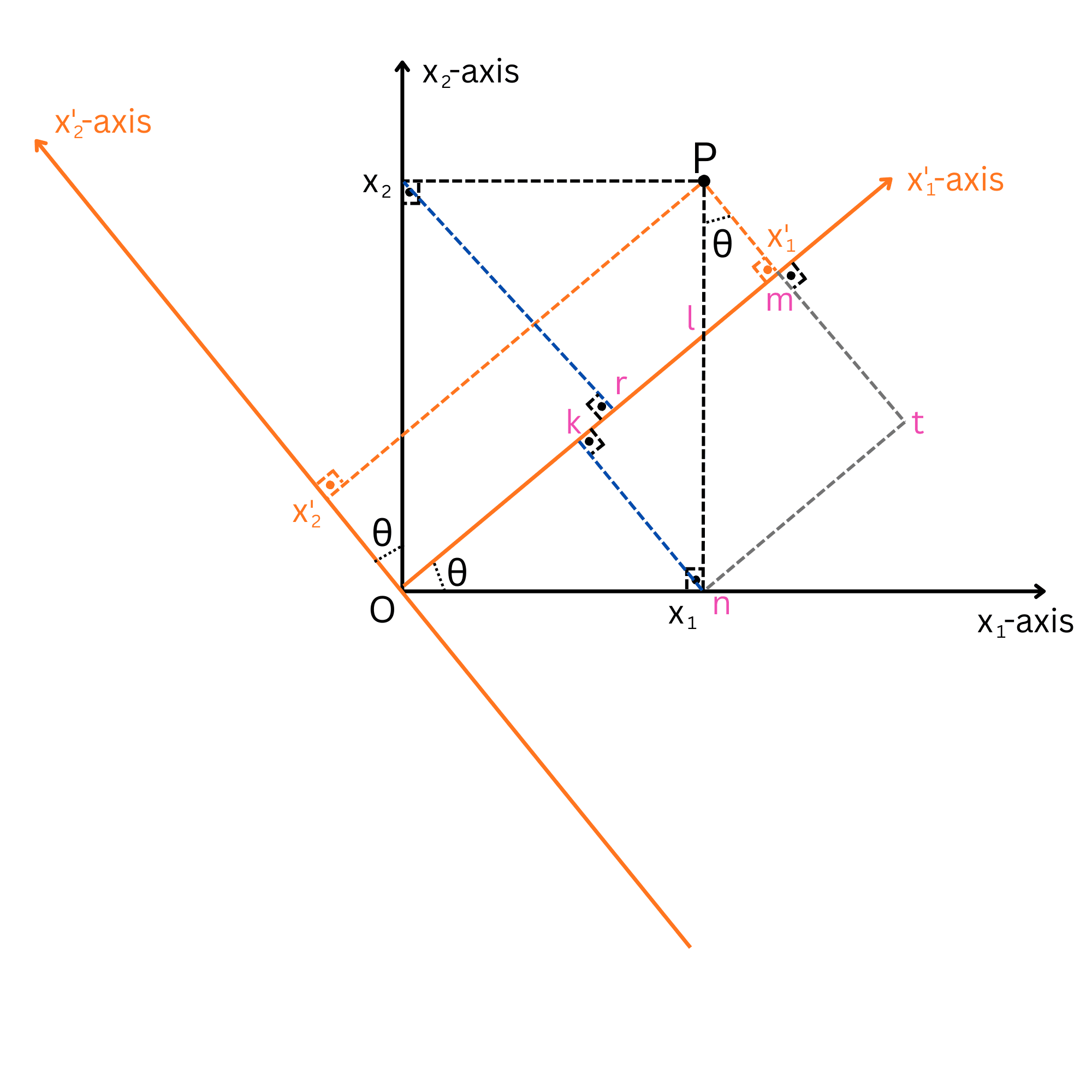
bir dikdörtgen olduğundan, uzunluğu ile uzunluklarının toplamına eşittir:
Benzer şekilde, bir dikdörtgen olduğu için olur. dik üçgenini kullanırsak elde edilir.
Dolayısıyla olduğundan yazabiliriz.
Ayrıca olduğuna göre elde edilir.
Sonuç olarak, ve koordinatlarını yeni ekseni üzerine izdüşürerek yeni koordinatı buluruz:
Benzer şekilde, Şekil 4’te gösterilen noktaları , , , ve olarak adlandıralım.
Daha sonra ve ’nin ekseni üzerindeki izdüşümlerini bulalım. Bu izdüşümler şöyle yazılır:
Bu doğru parçaları, ve koordinatlarının doğrultusundaki bileşenlerini gösterir.
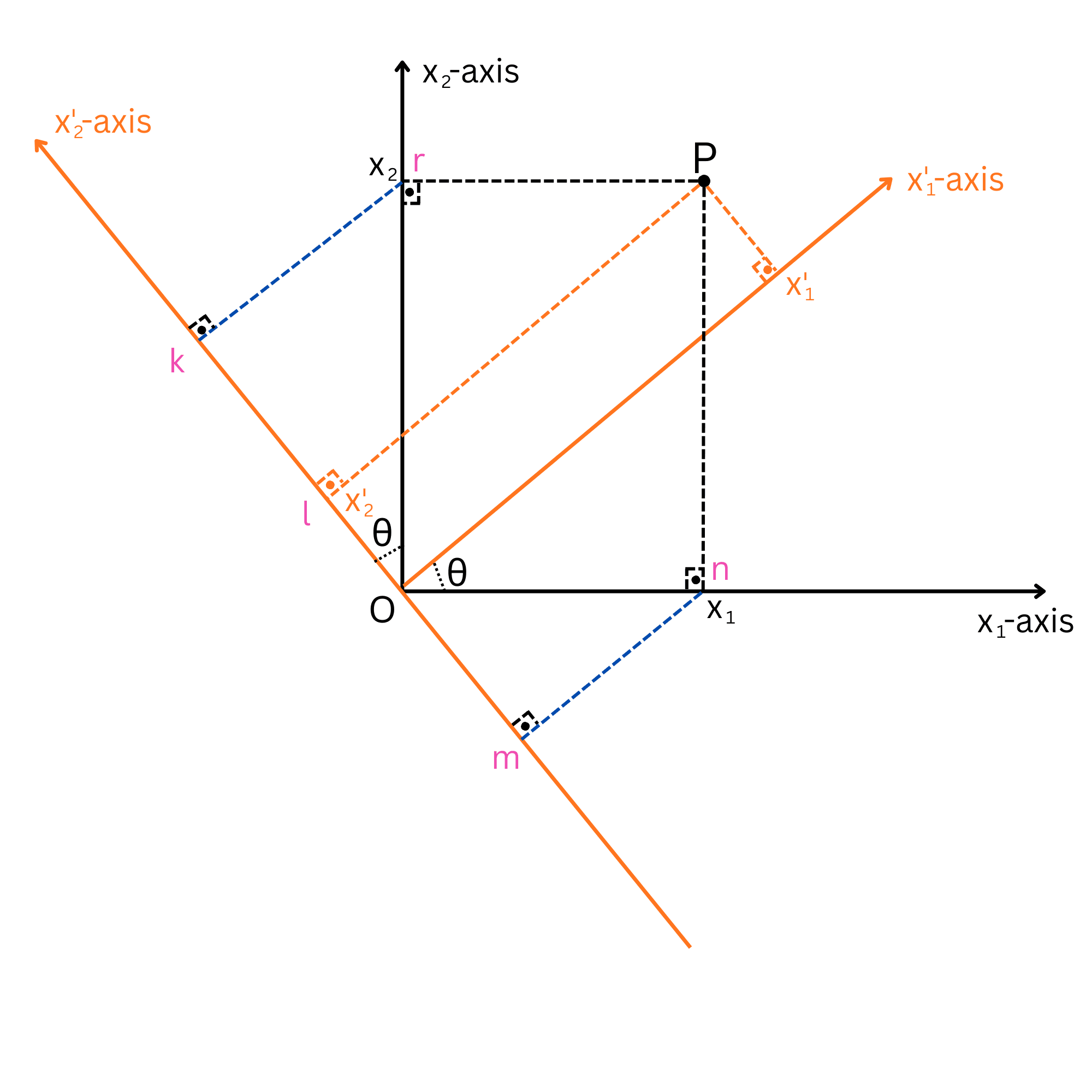
Daha sonra noktasından, doğru parçasına paralel bir doğru çizelim ve ayrıca eksenine paralel bir başka doğru çizelim. Bu iki doğrunun kesişim noktasını ile gösterelim (Bkz. Şekil 5).
Bu geometrik çizim, izdüşümler ile döndürülmüş koordinat ekseni arasındaki ilişkiyi görsel olarak anlamamıza yardımcı olur.
ve üçgenleri benzer ve benzerlik oranı 1 olduğundan buradan elde edilir.
Ayrıca bir dikdörtgen olduğundan olur. kullanılırsa sonucuna ulaşırız.
Şeklin geometrisinden (Bkz. Şekil 5) olduğu görülür.
Son olarak , , olduğuna göre, bunları
eşitliğinde yerine koyarsak elde edilir.
Elde ettiğimiz iki sonucu birleştirirsek, noktasının eski ve yeni koordinatları arasındaki ilişkiler şöyle olur:
Yön Kosinüsleri
Bu fikri genelleştirmek için kullanışlı bir gösterim tanıtırız. Yön kosinüsü , yeni eksen ile başlangıç ekseni arasındaki açının kosinüsü olarak tanımlanır:
Her değeri, başlangıçtaki -inci eksenin yeni -inci eksene ne kadar katkı yaptığını gösterir. Bu gösterimi kullandığımızda dönüşüm denklemleri daha düzenli ve daha kısa (kompakt) bir biçimde yazılabilir.
Yön Kosinüsü Gösterim Kuralı
ifadesinde ilk indis her zaman yeni (üstü çizgili, primli) ekseni, ikinci indis ise eski (primsiz) ekseni gösterir.
Bunu şöyle düşünebilirsiniz:
“Eski ekseni, yeni ekseni ile nasıl ilişkilidir?”
3 Boyutta Genel Dönüşüm
Üç boyutta, her yeni koordinat; üç eski koordinatın uygun yön kosinüsleri ile ağırlıklandırılmış doğrusal birleşimi şeklinde yazılır:
İleri dönüşüm (Forward transformation): Başlangıç koordinatlarından döndürülmüş koordinatlara geçişi ifade eder.
Ters dönüşüm — yani döndürülmüş koordinat sisteminden tekrar başlangıç sistemine geçiş — çok benzer bir biçimde yazılır, Burada dikkat edilmesi gereken nokta, katsayılarının indislerinin yer değiştirmiş olmasıdır:
Ters dönüşüm (Inverse transformation): Döndürülmüş koordinatlardan başlangıç koordinatlarına geçişi ifade eder.
Dönüşüm (Rotasyon) Matrisi
Tüm yön kosinüslerini bir kare düzen içinde toplamak doğaldır. Böylece dönüşüm matrisi (ya da rotasyon matrisi) elde edilir:
Bu matrisin her satırı, yeni eksenlerden birinin yön kosinüslerini içerir.
matrisi bilindiğinde, herhangi bir noktanın koordinatlarını iki koordinat sistemi arasında dönüştürmek mümkün olur.
Rotasyon Matrisini Okuma
matrisinin -inci satırı, yeni ekseninin başlangıç eksenlerine göre nasıl yöneldiğini gösterir.
-inci sütun ise başlangıç ekseni ’in tüm yeni eksenler üzerindeki izdüşümlerini gösterir.
Örnek 1 — $x_1$ Ekseni Etrafında 30° Dönme
Bir noktasının başlangıç koordinat sistemindeki koordinatları olsun.
İkinci bir koordinat sistemi, ekseni etrafında 30° döndürülerek elde ediliyor. Bu dönüşte ekseni sabit kalır ve ekseni yönüne doğru döner.
Rotasyon matrisi ve noktanın yeni koordinatlarını bulalım.
chevron_rightÇözümü Göster
Dönme ekseni etrafında olduğu için ekseni ile ekseni çakışıktır. Bu nedenle yön kosinüsleri:
Buna göre rotasyon matrisi:
İleri dönüşüm uygulanırsa:
Sonuç olarak noktanın yeni koordinatları yaklaşık olarak: .
Yaygın Hata
Açıların işaretlerini seçerken dikkatli olun.
gibi yön kosinüsleri hesaplanırken, kullanılan açı yeni eksenin dik doğrultuyu aşarak döndüğünü ifade eder. Bu nedenle doğru açıyı kullanmak önemlidir.
İşaretin yanlış alınması durumunda, yeni eksen tamamen ters yönde belirlenmiş olur.